PID Control Basics
PID Control Basics
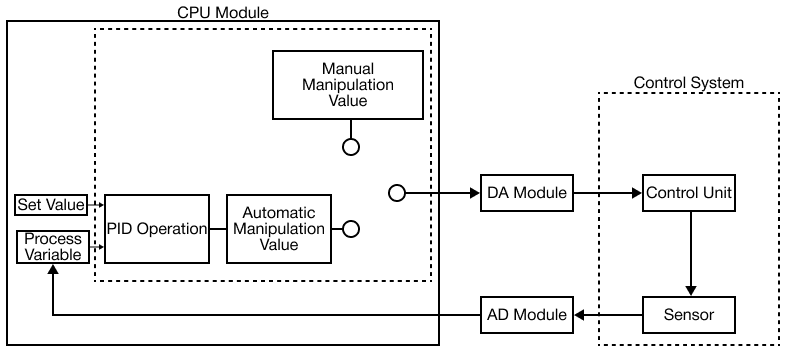
Proportional-Integral-Derivative, PID, control is a control loop feedback mechanism in which the controller continuously calculates an error value as the difference between a measured process value (PV) and a desired set value (SV).
The PID controller attempts to minimize the error over time by adjusting a control variable to a new value.
- In this control:
- P accounts for the present values of the error.
- I accounts for the past value of the error.
- D accounts for the predicted future values of the error based on the current rate of change.
PID2 Notice
- CICON version 4.01 supports PID control for all types of CIMON PLCs.
- PID2 functions are available with the following PLC type and firmware:
| PID Availability | ||||
|---|---|---|---|---|
| CPU | XP | CP | BP | PLC-S |
| Version | v4.27 | v4.26 | - | v1.37 |
The self-learning function is not supported on the CP3U and CP4U CPUs.
PID Basics
Direct/Forward Action & Reverse Action
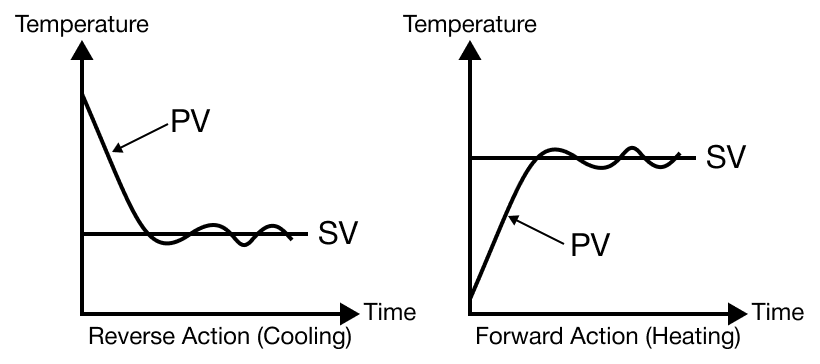
- Direct/Forward Action:
- The manipulation value (MV) will increase when the process value (PV) is greater than the set value (SV).
- Works with heating systems.
- Reverse Action:
- The manipulation value (MV) will decrease when the process value (PV) is greater than the set value (SV).
- Works with cooling systems.
Change of MV according to PV
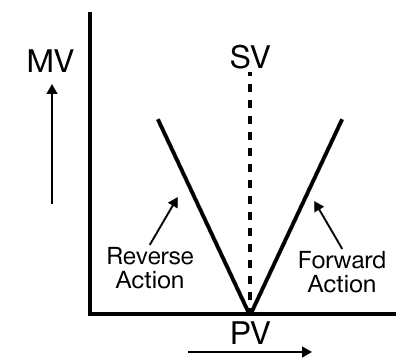
Control Graph by Forward and Reverse Action
Proportional (P) Control Action
-
Proportional (P) control generates the manipulation value (MV) in proportion to the error (E).
- E:
- Difference between the set value (SV) and process value (PV).
- E:
-
The manipulation value (MV) is calculated as follows:
- MV = Kp + E
- Kp: proportional gain
- If the Kp value is too large, the control process is getting fast but the system will be in danger for oscillation.
- If the Kp value is too small, the control process is getting slow to make it stable.
- Kp: proportional gain
- MV = Kp + E
-
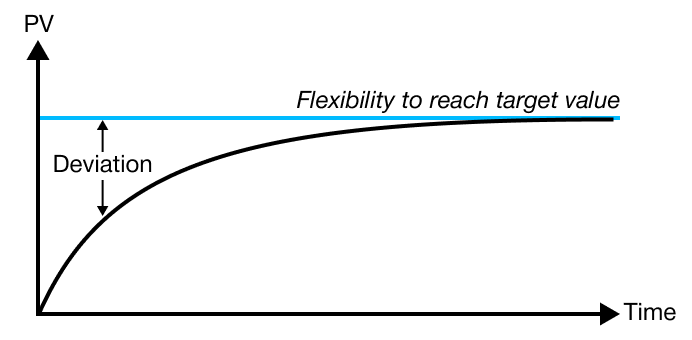
Under proportional (P) control, the offset, or residual error, will remain until the bias on the controller's output is manually changed to remove the offset.
Integral (I) Control Action
-
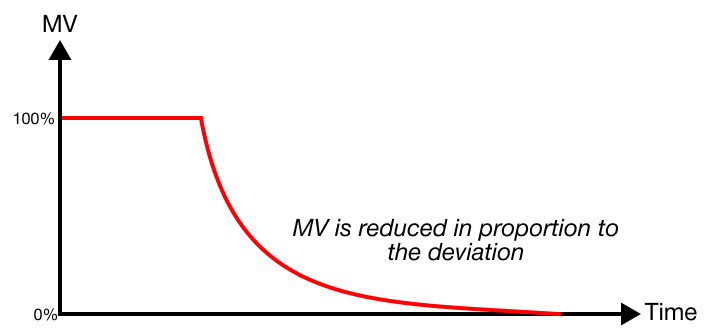
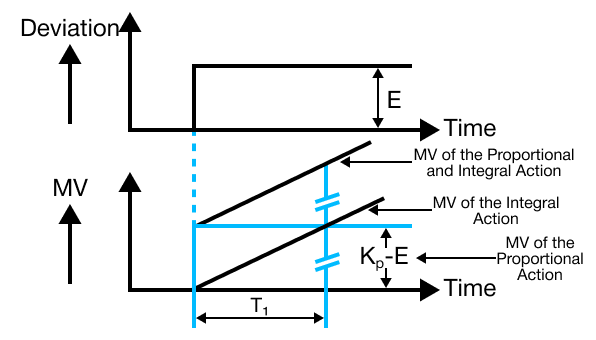
Integral (I) control will generate the manipulation value (MV) in proportion to the time-integral of the error (E).
-
Integral action eliminates the offset.
-
If the integral time is set too long, the controller will be sluggish.
-
If the integral time is set too short, the control loop will oscillate and become unstable.
-
The integral (I) action is used with the PI control or PID control.
- It is not used by itself.
Derivative (D) Control Action
-
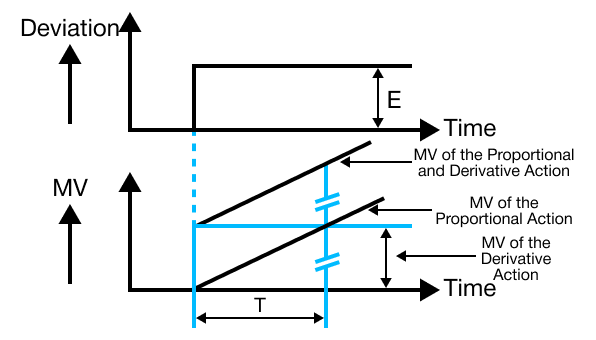
Derivative (D) control will generate the manipulation value (MV) in proportion to the rate of change in the error (E).
-
By adding the D control, quick corrective action can be obtained at the beginning of the upset condition.
-
If the derivative time is set too long, oscillations will occur and the control loop will run unstable.
-
If the derivative time is set to 0, the derivative control does NOT function.
-
The derivative (D) control is used with PI and PID control.
- It is not used by itself.
PID Control Formula
- The direct/forward action, reverse action, and filtered present value are calculated in the following:
Direct/Forward Action
- MVn = MVn-1 + Kp{(En - En-1) + (Ts / Ki) × En + (Kd / Ts) × (2PVnf-1 - PVnf - PVnf-2)}
- En = SV - PVnf
Reverse Action
- MVn = MVn-1 + Kp{(En - En-1) + (Ts / Ki) × En - (Kd / Ts) × (2PVnf-1 - PVnf - PVnf-2)}
- En = PVnf - SV
Filtered Present Value
- PVnf = PVn + α(PVnf-1 - PVn)
Variables
- En: Currently sampling deviation
- En-1: Deviation at an interval before
- Kp: Proportional integer
- Ki: Integral integer
- Kd: Differential integer
- Ts: Sampling interval
- α: Filter coefficient
- MVn: Present manipulation value
- SV: Set value
- PVn: Process value of the present sampling cycle
- PVnf: Process value of the present sampling cycle after filtering
- PVnf-1: Process value of the preceding sampling cycle after filtering
- PVnf-2: Process value of the sampling cycle two cycles before after filtering